
SLAMレーザー計測
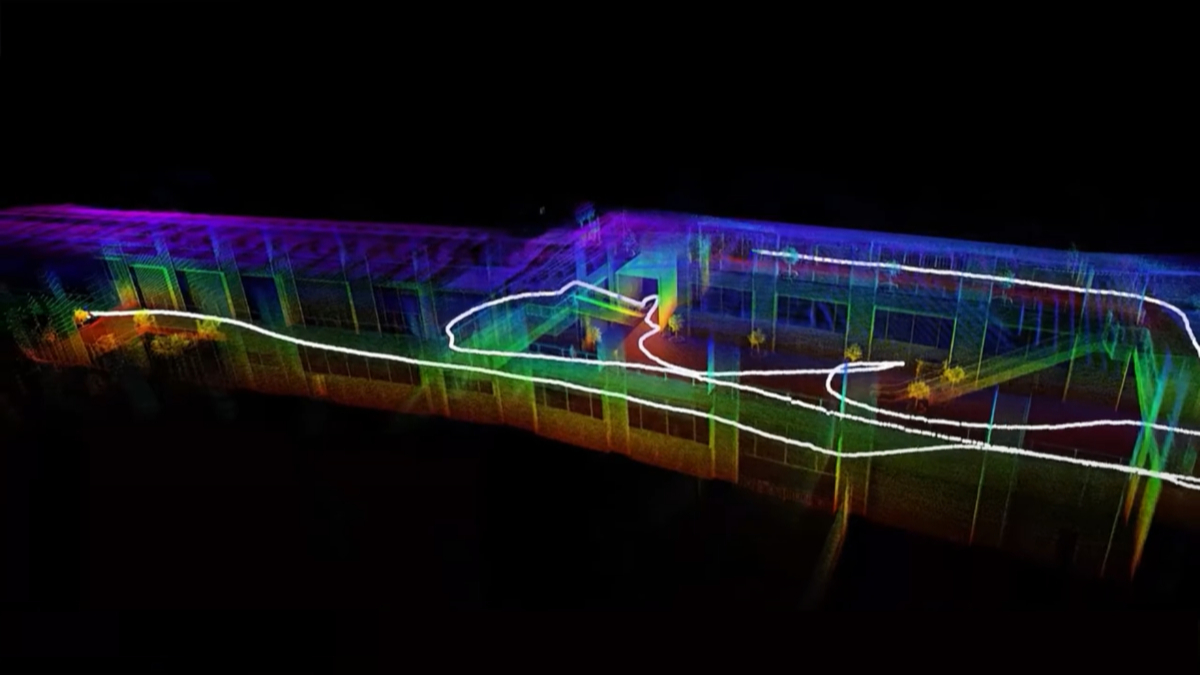


SLAMレーザー計測は、歩行しながらLiDAR(レーザースキャナ)からレーザーを照射して、三次元の点群データを取得する計測手法です。 LiDARの出力値は3D (X,Y,Z座標)の点群データとなっており、高い精度で物体までの距離が計測できます。
LiDAR SLAMは、カメラを用いたVisual SLAMと比べて遠距離での測距精度に優れ、より精度の高いなマップを短時間で生成することができます。
ただし計測エリア内に構造物等の特徴形状が少ない平坦地や自然地形、またトンネルや回廊のような形状変化の乏しい同じ形状が連続する計測対象では、自己位置の算出が難しく点群データの取得に不向きな手法となるので、固定式レーザー計測を用いて補完を行う場合があります。
SLAMレーザー計測の適用事例
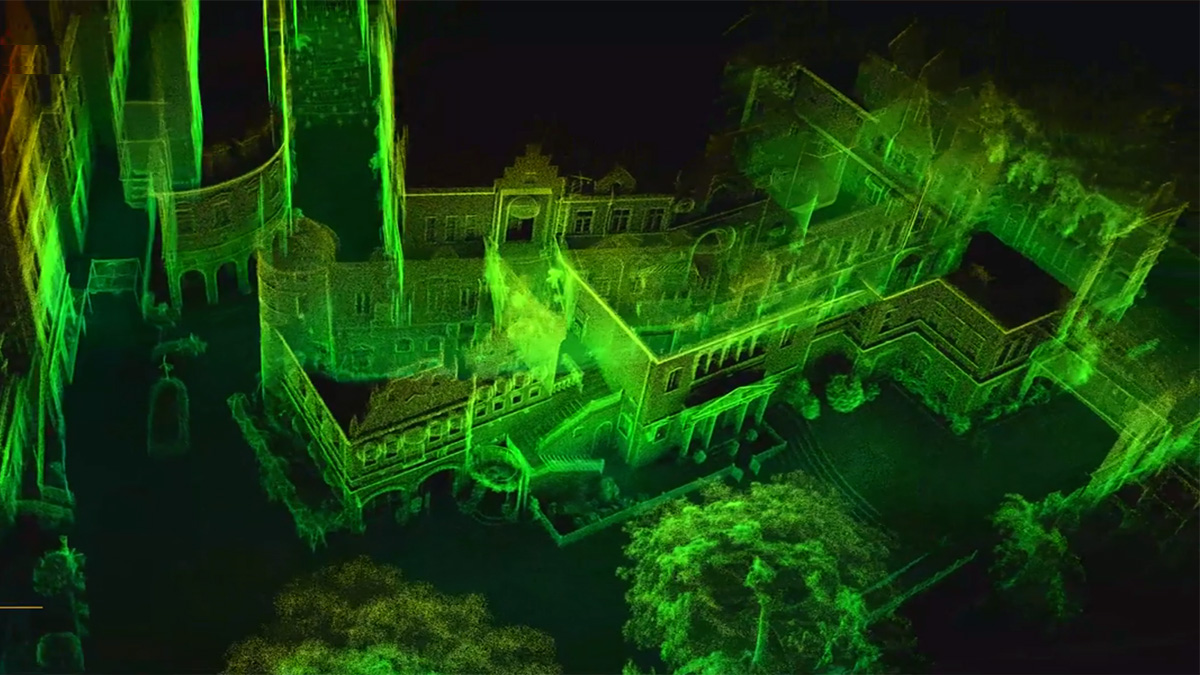
- 土木・建設・測量など、市街地を対象とした現況取得
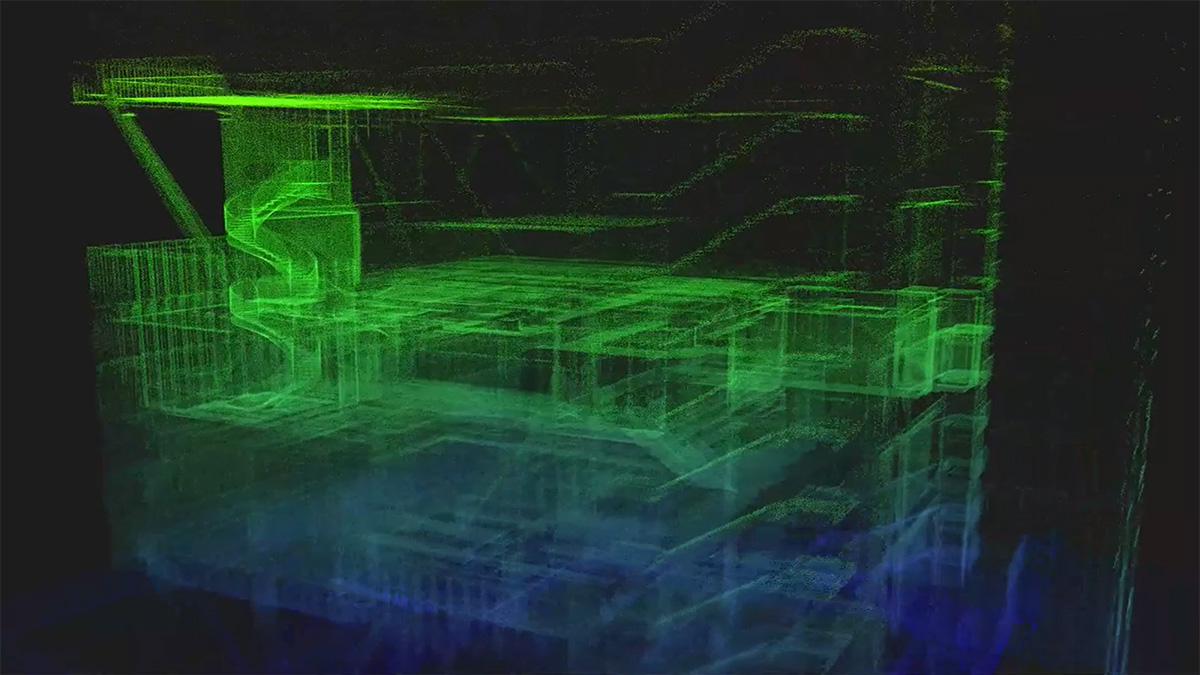
- プラント、工場、橋梁、道路、建築物など、内観・外観の形状取得
- 3Dプロジェクションマッピング・映画・TV・ゲームなど、CG素材の取得
- 屋内外に保管されている各種原材料・生産品の棚卸数量に体積を算出
- 災害・事故現場など、短時間での現況調査
- © 3D GEOKOSMOS, Ltd. All rights reserved
- サイトマップ
- プライバシーポリシー
